|
I'm a fourth-year PhD student advised by Xiaolong Wang and currently visiting Embodied Minds Lab under the supervision of Yilun Du. I earned an MEng from UC Berkeley and a BEng from Nankai University, and have spent time at Google, Amazon, and MIT. Email / Resume / Google Scholar / Twitter |

|
|
I am interested in robotics, machine learning and reinforcement learning. |

|
An-Chieh Cheng*, Yandong Ji*, Zhaojing Yang*, Zaitian Gongye, Xueyan Zou, Jan Kautz, Erdem Biyik, Hongxu Yin†, Sifei Liu†, Xiaolong Wang† RSS, 2025 paper / project page |

|
Minghuan Liu*, Zixuan Chen*, Xuxin Cheng, Yandong Ji, Rizhao Qiu, Ruihan Yang, Xiaolong Wang CoRL, 2024 paper / project page |

|
Xuxin Cheng*, Yandong Ji*, Junming Chen, Ruihan Yang, Ge Yang, Xiaolong Wang RSS, 2024 paper / project page / UC San Diego Today Humanoid robot tracking root movement and expression goal with whole-body controller. |
|
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal ICRA, 2024 paper / project page Learning to control the force applied by a legged robot's arm for compliant and forceful manipulation. |
|
Gabriel B. Margolis, Xiang Fu, Yandong Ji, Pulkit Agrawal CoRL, 2023 paper / project page Learn to see how terrains feel by collecting self-supervised data with information-maximizing motor skills. |

|
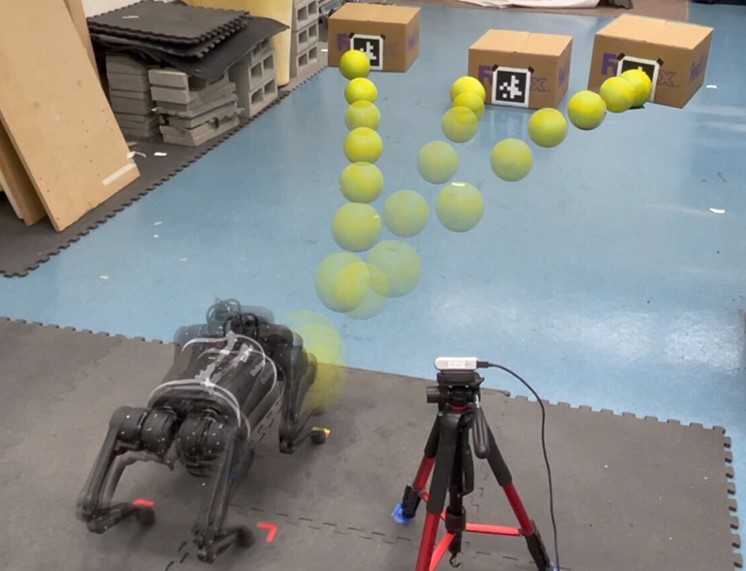
Yandong Ji*, Gabriel B. Margolis* , Pulkit Agrawal International Conference on Robotics and Automation (ICRA), 2023 paper / project page / MIT homepage spotlight / MIT News / Boston.com / WHDH / IEEE Spectrum / Business Insider Dynamic object manipulation with legs using onboard computation and sensing. |
|
Yandong Ji*, Zhongyu Li*, Yinan Sun, Xue Bin Peng, Sergey Levine, Glen Berseth, Koushil Sreenath IROS, 2022, (Best RoboCup Paper Award Finalist) project page / arXiv / TechXplore Honing soccer shooting skills in the real world |
|
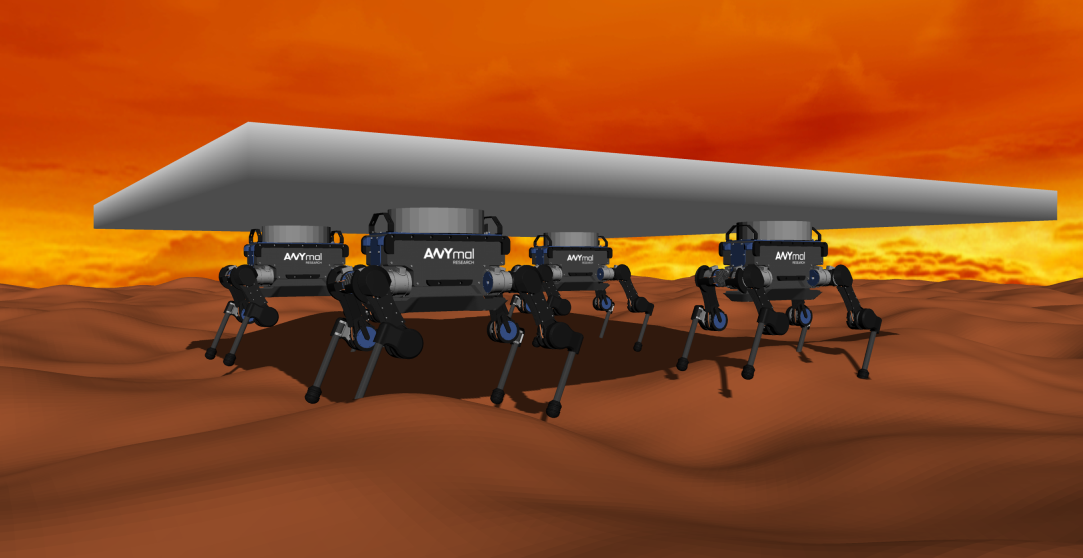
Yandong Ji, Bike Zhang, Koushil Sreenath IEEE CASE, 2021 project page A decentralized payload manipulation system in simulation |
|
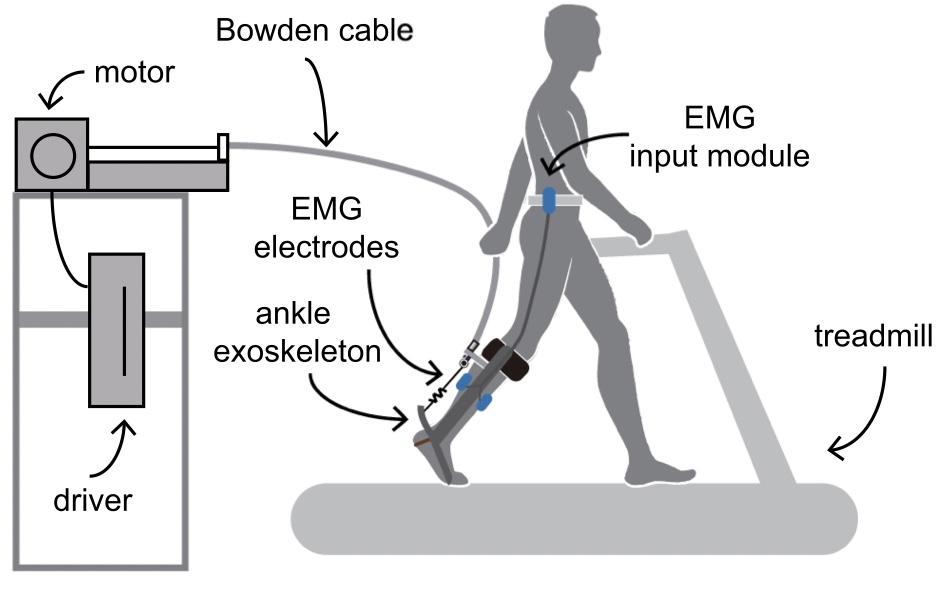
Wei Wang, Jianyu Chen, Yandong Ji, Wei Jin, Jingtai Liu, Juanjuan Zhang IEEE Transactions on Industrial Informatics, 2020 Systematic evaluation of exoskeleton assistance performance based on EMG metrics |